por admin-82ha | Dic 21, 2021 | Automatización, Componentes, Grippers
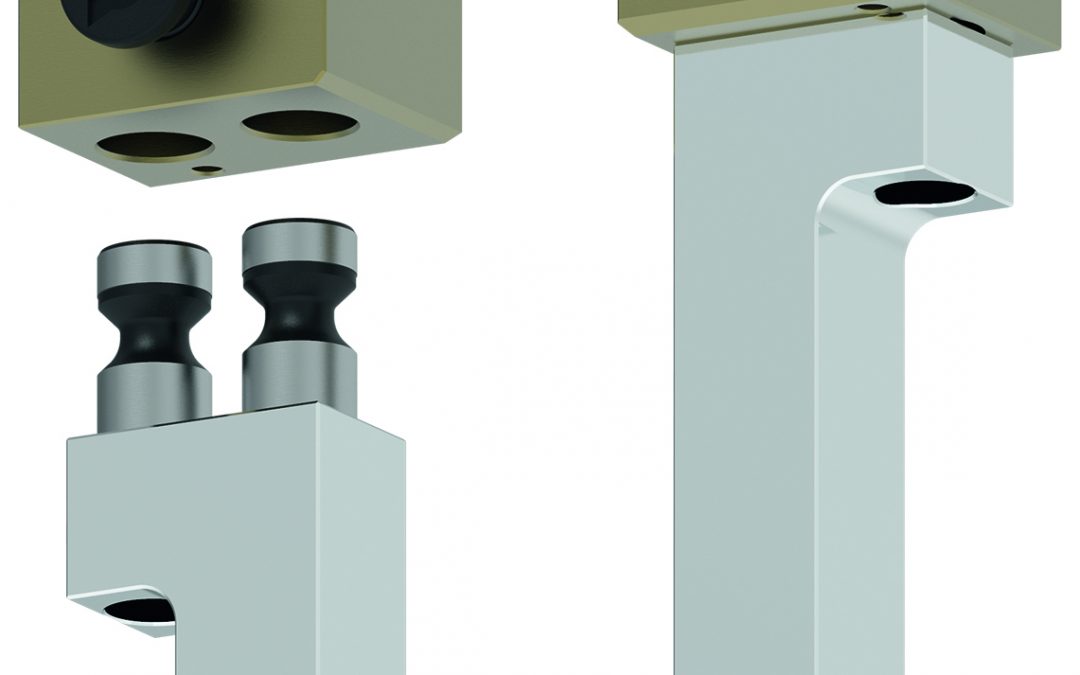
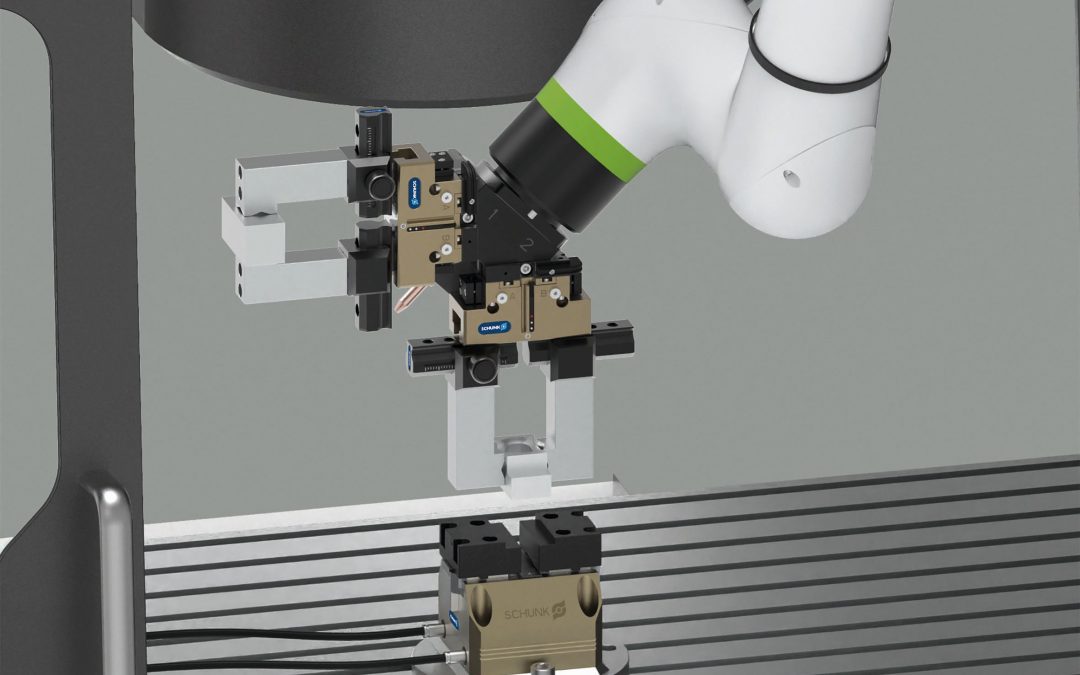
SCHUNK está ampliando su gama para el cambio rápido de los dedos prensores. Mientras que para el ya probado sistema de cambio rápido de dedos SCHUNK BSWS todavía se requería de una llave hexagonal, todo lo que se necesita con el nuevo SCHUNK BSWS-M es pulsar un botón...
por admin-82ha | Nov 25, 2021 | Automatización, Grippers, Industria 4.0, Robótica, Robótica industrial, socios
Con la nueva y optimizada pinza neumática paralela de 2 dedos JGP-P, SCHUNK está ampliando aún más su serie de grippers universales junto a su buque insignia PGN-plus-P. El sucesor de la JGP cuenta con una mayor fuerza de agarre, más flexibilidad en la aplicación y...

por admin-82ha | Oct 14, 2021 | Automatización, Componentes, Grippers, Robótica, Robótica industrial
Con la tecnología de agarre de inspiración biónica ADHESO de SCHUNK, los usuarios pueden manipular las piezas más sensibles con suavidad, sin residuos y completamente sin energía externa. La nueva tecnología ha recibido el premio German Innovation Award 2021 del...
por admin-82ha | Jun 7, 2021 | Automatización, Componentes, Grippers, Robótica, Robótica industrial
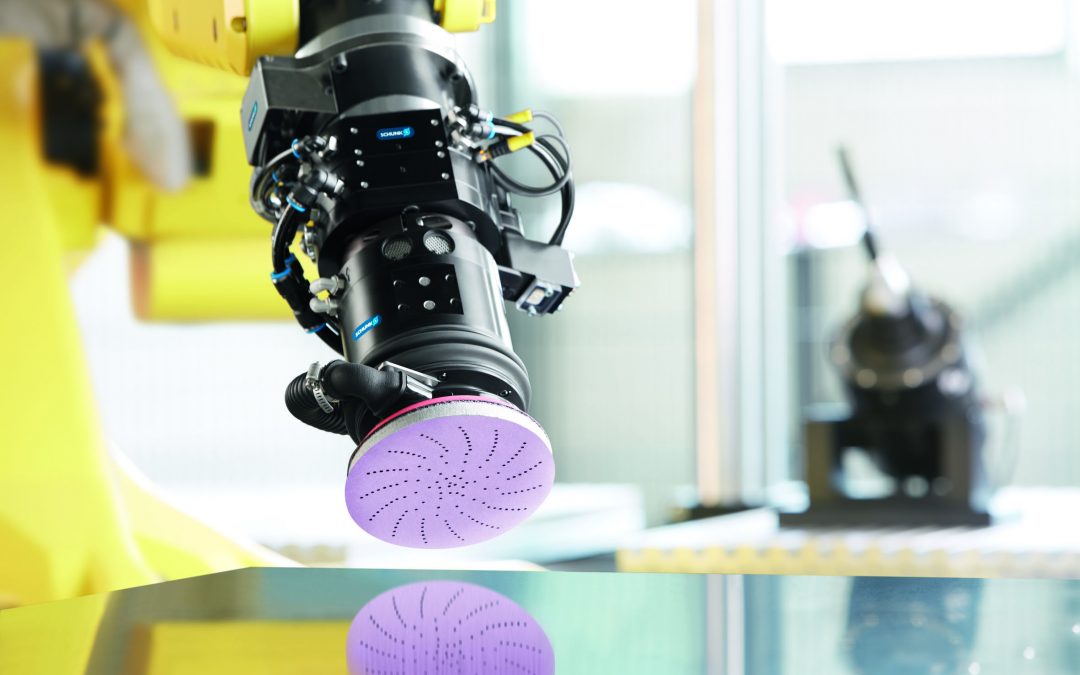
El rectificado y el pulido se utilizan para el acabado de superficies, ya sea con la eliminación de material grueso para su posterior procesamiento o como procesamiento final para lograr un acabado perfecto de la pieza. Esto requiere sensibilidad y un reajuste...

por admin-82ha | Abr 29, 2021 | Automatización, Grippers, Nuevos productos, Robótica industrial
En el mundo de la automatización colaborativa, la seguridad es imprescindible. El reto es desarrollar sistemas cada vez más precisos, para ganar en productividad, al mismo tiempo que generen una mayor confianza en el trabajo compartido entre humanos y robots. Por...
por admin-82ha | Abr 13, 2021 | Automatización, Componentes, Grippers, socios
En la producción de sistemas de agarre modernos, se fabrica un amplio número de productos en diferentes tamaños de lote. Hasta ahora, las pinzas se montaban de forma manual en estaciones de trabajo tradicionales, lo cual implicaba riesgo de tensión física unilateral,...