La manipulación de material en los procesos productivos, tanto para la alimentación a máquina como para la preparación de pedidos es una tarea de poco valor añadido y susceptible de ser automatizada.
Sin embargo, estas actividades suelen ser complejas de automatizar por diversas razones: el coste asociado y el retorno de la inversión, la variabilidad de producto y la forma en que llega el material, entre otros. La problemática del “bin picking” se ha abordado durante años a nivel de investigación y, actualmente con la tecnología de visión 3D existente, se vislumbra la posibilidad de ofrecer soluciones industriales.
Tekniker, miembro de Basque Research and Technology Alliance (BRTA), ha completado su propio desarrollo de bin picking, independiente de la marca, modelo de robot y cámara utilizados. Los algoritmos utilizados son desarrollos propios, por lo que cualquier tipo de adaptación y mejora es factible.
El desarrollo realizado incluye también un sistema de calibración rápido entre sistema de visión y robot, de forma que, tras una reparación de robot, o cambio de layout de la célula, se pueda conseguir una puesta en funcionamiento en muy poco tiempo. Se ha desarrollado un estándar que incluye las comunicaciones entre PLC, robot y sistema de visión, con lo que resulta relativamente sencillo integrarlo en sistemas de terceros.
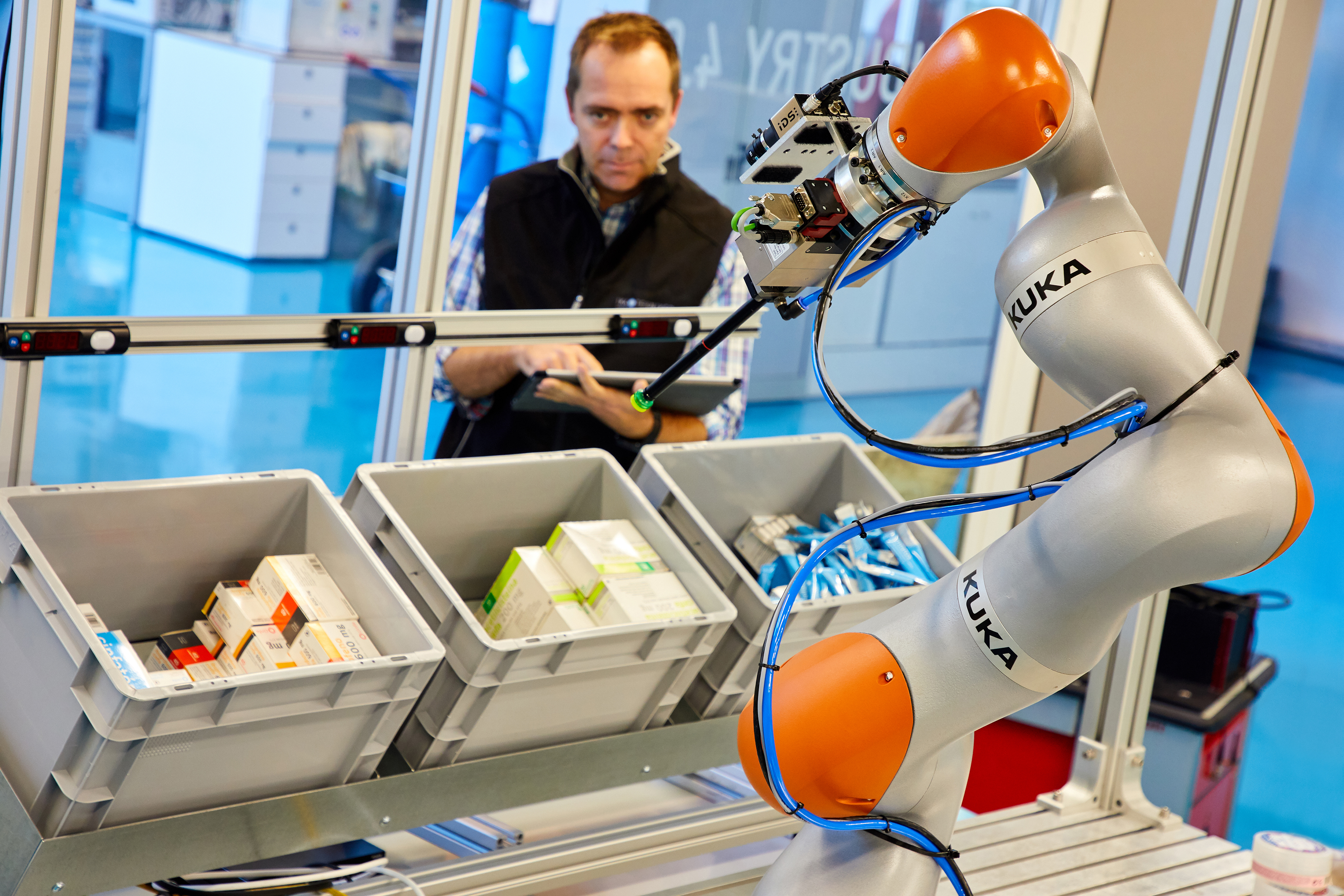
La solución de bin picking de Tekniker responde a una demanda industrial de extracción de piezas desordenadas en contenedores o cestones, combinando visión artificial para la identificación de piezas a extraer y robótica para su manipulación.
Noticia enviada por Tekniker