

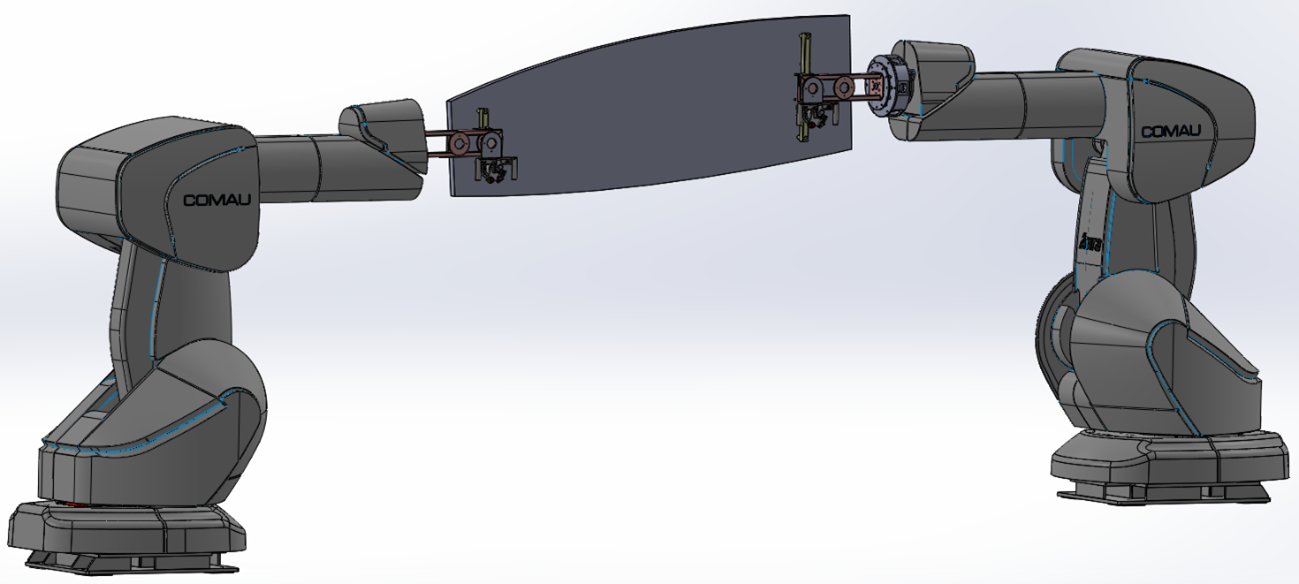
Investigadores de TECNALIA y de la Universidad de Patras en colaboración con el fabricante de robots COMAU y las empresas AERNNOVA y KEYTECH, usuarios finales, están desarrollando varias aplicaciones para proveer una solución flexible, reconfigurable y colaborativa capaz de manejar y sujetar componentes complejos de gran pesaje y volumen para operaciones de aplicación de sellante y de soldadura. Para ello se están utilizando además de robot convencionales antropomórficos, robots colaborativos capaces de soportar pesos que podrían alcanzar 250 kg. El manejo de estas piezas de grandes dimensiones se realiza de manera sincronizada por dos robots que soportan hasta 170kg cada uno. El especialista, a través de un sistema manual de guiado colocado en cada robot, agarra la pieza en dos extremos especificados, dependientes de la pieza, de una manera segura y colaborativa. El sistema de agarre diseñado absorbe de una manera flexible los posibles desalineamientos del montaje y de la manipulación automática. A través de gemelos digitales de las aplicaciones, el especialista interactúa con los robots y el proceso, conociendo en todo momento el estado del mismo. Estos gemelos digitales interactivos se han desarrollado en el entorno de simulación de Gazebo en combinación con módulos disponibles en ROS.
Estos sistemas están siendo testados en las instalaciones de TECNALIA con resultados prometedores que se publicarán en el próximo Congreso de Ciencia de la Computación, Electrónica e Ingeniería Industrial (octubre del 2021).
Los desarrollos están siendo realizados bajo el proyecto SOFOCLES (https://eit-mfg-sofocles.eu/) subvencionado por el EIT Manufacturing dependiente de la EU.
Noticia enviada por Tecnalia