Fuente: Agencia Estatal de Investigación
Foto 1: Robot humanoide TEO desarrollado por el RoboticsLab de la UC3M.
El grupo de investigación RoboticsLab de la UC3M, con más de 25 años de experiencia, está formado por más de 80 investigadores nacionales e internacionales expertos en el campo de la Robótica y la Automatización. Las líneas de investigación de interés del grupo son la robótica humanoide, la robótica blanda, los exoesqueletos, la robótica asistencial, la robótica social, la interacción humano-robot, los sistemas basados en inteligencia artificial, la planificación de robots móviles y el desarrollo de plataformas robóticas desde cero, tanto a nivel hardware como software, entre otros proyectos relacionados con la automatización y la industria conectada 4.0.
En el afán de diseñar robots cada vez más avanzados, útiles y seguros para la sociedad en su conjunto, el equipo comenzó a trabajar hace casi una década en el desarrollo de robots blandos, constituyéndose así el laboratorio de Robótica Blanda. Son ya varios los proyectos nacionales e internacionales liderados por este grupo, los cuales han permitido desarrollar articulaciones blandas para diversos robots asistenciales, buscando siempre la mejora de sus prestaciones en la interacción humano-robot. Se trata de una línea de investigación puntera en la que el equipo es ya un referente tanto a nivel nacional como internacional, como así lo avalan las colaboraciones mantenidas con otros grupos de investigación internacionales líderes en este campo y los numerosos reconocimientos recibidos en los últimos años.
Proyecto SOFÍA: Nuevas articulaciones blandas para robots avanzados
El objetivo principal del proyecto SOFÍA financiado por la AEI, es el desarrollo de un nuevo concepto de articulación blanda para su integración en numerosos tipos de plataformas robóticas, como puedan ser los robots humanoides (Foto 1), robots manipuladores y exoesqueletos, entre otros. Así mismo, podrán ser usadas en otras plataformas (dispositivos médicos y espaciales, por ejemplo) que requieran el uso de articulaciones para generar movimiento complejo. Estas articulaciones estarán compuestas por elementos blandos actuados por tendones que, gracias a un control altamente robusto basado en inteligencia artificial, permitirán al robot desempeñar un amplio número de tareas de posicionamiento y manipulación, soportando muy diversas cargas. Además, las articulaciones serán modulares y escalables, lo que permitirá conectar varias entre sí y adaptarlas al tamaño del robot para una mejor integración, como se muestra en la Foto 2.
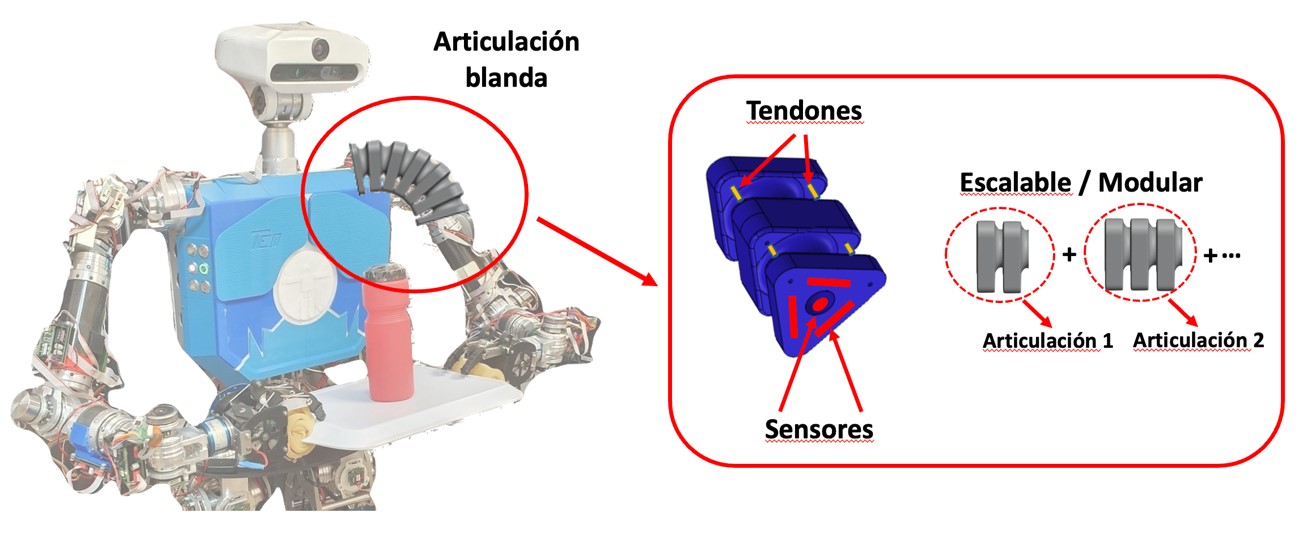
Foto 2: Articulación blanda inteligente integrada en el hombro del robot humanoide TEO. Izquierda: robot TEO manipulando una botella sobre una bandeja. Derecha: detalle de la articulación blanda propuesta, actuada por tendones y con características de escalabilidad y modularidad.
Las principales ventajas de estas nuevas articulaciones frente a otras más tradicionales de características rígidas son el aumento de la accesibilidad y adaptabilidad de los robots a entornos complejos, con un control postural que difícilmente puede ser implementado en robots rígidos; una interacción más segura con las personas y el entorno, con un alto nivel de absorción de los posibles impactos aumentando su estabilidad; y una mayor simplicidad del diseño de los robots, gracias a que estas articulaciones se fabrican con materiales blandos que pueden tener capacidades actuadoras y sensoras por sí mismos, como los materiales basados en nanofibras de carbono, sin necesidad de integrar sistemas actuadores y sensores externos.
Como resultado del proyecto se espera obtener una solución tecnológica de articulación robótica blanda e inteligente, modular y escalable para su integración en todo tipo de robots, como la que se muestra en la Figura de la portada. Concretamente, el prototipo desarrollado se integrará en un robot humanoide, un robot manipulador y un exoesqueleto con el objeto de estudiar el desempeño de estos robots con estas nuevas articulaciones y medir de manera objetiva las ventajas de su uso frente a articulaciones rígidas. Se espera además alcanzar la madurez tecnológica suficiente para que dicha solución sea transferible a la industria, contando ya con el interés de varias empresas del sector en adquirir dicha tecnología. Se ha definido un plan de transferencia para explotar al máximo estas posibilidades.
Un avance fundamental frente a la limitada accesibilidad y adaptabilidad de robot fijos a espacios complejos
Desde un punto de vista científico-técnico, se espera que el desarrollo de robots de articulaciones blandas tenga un gran impacto, puesto que apenas existen aplicaciones reales de este tipo de robots. Los robots blandos supondrán un avance frente a la limitada accesibilidad y adaptabilidad a espacios complejos que presentan los robots rígidos, su limitado repertorio de movimientos y la reducida seguridad en la interacción humano-robot. El laboratorio de Robótica Blanda del RoboticsLab colabora activamente con el Instituto de Biorobótica de Pisa y con el Centro Aeroespacial Alemán (DLR) de Munich, que son referentes en este campo, por lo que el impacto científico será a nivel internacional. También se considera de alto impacto la investigación sobre los materiales de nanofibra de carbono, que permitirá potenciar sus múltiples usos como elementos actuadores y sensores para muy distintos fines.
La importancia de la robótica para la sociedad y la economía está reconocida por la Comisión Europea y por otros muchos organismos internacionales. Dichas organizaciones apuntan que los robots avanzados, capaces de desempeñar tareas complejas en entornos desestructurados y cambiantes, tendrán un impacto de entre 1,7 y 4,5 trillones de dólares en 2025. El desarrollo de robots preparados para trabajar en entornos más demandantes es de vital importancia para que estas cifras se hagan realidad, y las articulaciones robóticas blandas son un habilitador fundamental para ello, como ya lo han demostrado numerosos trabajos previos.
Por otro lado, los materiales blandos son otro demostrador relevante al que contribuye este proyecto, con un potencial prometedor tanto fuera como dentro de las aplicaciones robóticas. Se estima que el mercado de robots tradicionales es de alrededor de 20 billones de dólares, con unas ventas anuales en torno a los 200.000 robots. Este mercado tiene el potencial de crecer mucho más si se facilita una interacción humano-robot más blanda y segura, lo cual es posible gracias a la introducción de este tipo de materiales en la fabricación de los robots. Y más importante aún, se estima que los robots blandos serán de gran interés para la pequeña y mediana empresa, que es la columna vertebral de la economía europea. Prueba de ello es que estos robots ya están introduciéndose en el mercado a través de empresas jóvenes como Soft Robotics® and Empire Robotics®.

Concepción Alicia Monje Micharet es Doctora en Ingeniería Industrial (2006) por la Universidad de Extremadura con distinción de Doctorado Europeo y Premio Extraordinario de Doctorado. Se incorporó a la Universidad Carlos III de Madrid (UC3M) (2006) como Profesora Visitante del Departamento de Ingeniería de Sistemas y Automática, donde es Profesora Titular desde el año 2017. Trabaja en el campo del control y la robótica desde hace más de 18 años. Realizó dos estancias de investigación con el equipo CRONE del ENSEIRB (Burdeos, Francia) (2003-2004), con quien publicó varios trabajos relacionados con la sintonía de controladores de orden fraccionario y co-organizó la conferencia FDA’06 de la IFAC. Sus colaboraciones en este campo se extienden al Center for Self-Organizing and Intelligent System (CSOIS) de la Universidad Estatal de Utah, en USA, donde realizó una estancia de investigación (2005) y fue invitada a impartir un curso a estudiantes de doctorado y una conferencia a los miembros del IEEE Control Systems Society San Diego Section. Además, ha colaborado con el German Aerospace Center (DLR, Alemania) (estancia de investigación en 2015) y con el Biorobotics Institute de Pisa (Italia) (estancia de investigación en 2019-2020) desarrollando estrategias de control para eslabones robóticos blandos, impartiendo varias charlas y publicando artículos de alto impacto en dicho campo.

Santiago Martínez de la Casa es Doctor por la Universidad Carlos III de Madrid (UC3M) en Ingeniería Eléctrica, Electrónica y Automática desde 2012 con distinción de ‘Doctorado Internacional’. Profesor Titular desde 2019 en el Departamento de Ingeniería de Sistemas y Automatización y miembro del grupo de investigación RoboticsLab desde 2005. Durante este periodo, ha participado en más de 40 proyectos de investigación competitivos, tanto nacionales como europeos (1 como IP). Asimismo, ha participado en más de 20 proyectos de investigación con empresas. Sus principales líneas de investigación son la robótica de la construcción y la robótica humanoide. En el campo de la robótica de la construcción, ha realizado una actividad investigadora continua desde 2005, comenzando con su participación en el proyecto FP6 EU ManuBuild (2005) hasta su reciente participación en el proyecto europeo HORIZON 2020 BADGER como Coordinador Técnico (proyecto coordinado por la UC3M). En el campo de la robótica humanoide, ha liderado el desarrollo del robot humanoide de tamaño completo TEO. Desde 2016, la robótica blanda se ha incorporado a este robot humanoide gracias a los proyectos HUMASoft y SOFIA. Como resultado de las actividades de investigación, es autor de cuatro patentes, una de ellas licenciada desde 2017.
Publicación original en este enlace.