

MICROMOTORES DE FAULHABER EN UN ROBOT MÓVIL AUTÓNOMO, PRECISIÓN Y FIABILIDAD EN UN AMR
“Caso de éxito: Los micromotores de Faulhaber se han incorporado en el nuevo AMR de Evocortex, estos son ideales ya que ofrecen mucha potencia en poco espacio”
Hacia la producción autónoma
En la era del Internet de las Cosas (IoT) y la Industria 4.0, la intralogística desempeña un papel fundamental. Para una producción totalmente automatizada, las piezas deben ser transportadas desde un punto a otro punto en el momento correcto. Con un innovador sistema de transporte autónomo, la empresa Evocortex, en colaboración con FAULHABER, ha creado un AGV que es capaz de ofrecer un elevado nivel de flexibilidad y precisión.
Los robots móviles autónomos, cada vez más utilizados en la intralogística
Las soluciones de transporte de materiales cada vez son más personalizadas y automatizadas. Las plataformas robóticas móviles -conocidas como robots móviles autónomos (AMR)- son cada vez más utilizadas en los almacenes y las salas de producción.
La startup Evocortex, con sede en Núremberg, fundada en 2016 con la participación de expertos en robótica, se centra en este mercado. La empresa persigue un concepto de AMR completamente nuevo en colaboración con la Universidad Técnica de Núremberg y otras instituciones.
¿Cómo funciona el sistema de AMR de Evocortex?
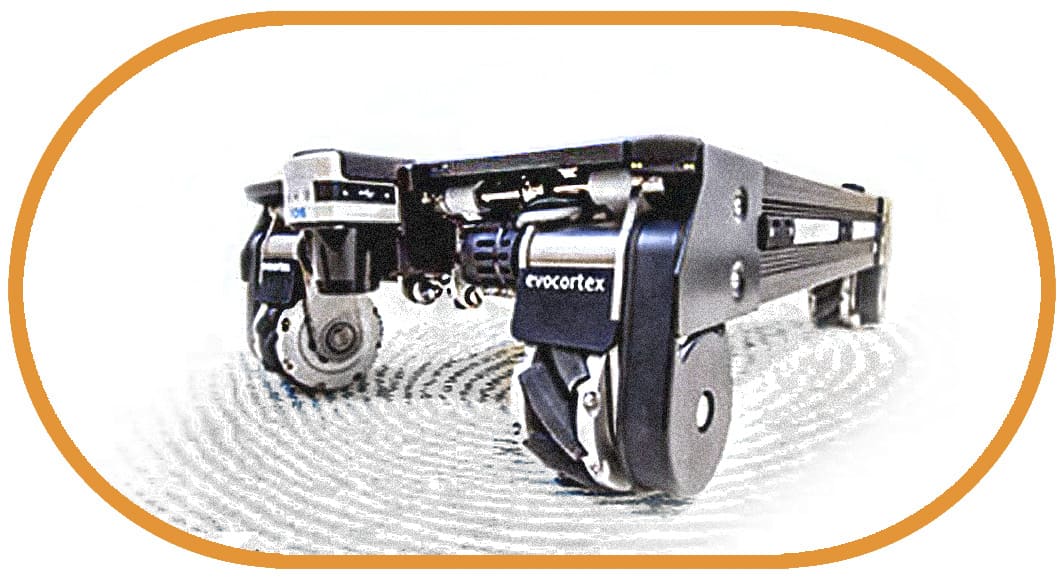
Los robots móviles autónomos (AMR) de Evocortex no necesitan ningún sistema de guía preinstalado para determinar su ubicación y encontrar el camino correcto. Se orientan simplemente gracias a las irregularidades del suelo de la sala. Éstas son registradas por una cámara de alta resolución montada en la parte inferior del vehículo. El robot utiliza las imágenes para obtener una “huella digital” del suelo. Detrás de este ingenioso sistema se encuentra el Módulo de Localización (ELM) desarrollado por Evocortex.
Durante el proceso inicial, el robot se desplaza por el suelo del vestíbulo siguiendo un patrón cuadriculado. Con la ayuda de complejos algoritmos, se elabora un mapa muy preciso a partir de un patrón de puntos individuales. Además, el controlador detecta el movimiento del propio vehículo. Combinando los datos, puede -en un área teórica de un kilómetro cuadrado- posicionarse con una precisión de un milímetro. Para ello, sólo se necesitan tres puntos identificados. Aunque el 50% del suelo esté cubierto de serrín, el ELM permanece imperturbable y garantiza una navegación robusta, precisa y exacta.
Los AMR pueden equiparse opcionalmente con sensores LIDAR adicionales en uno o dos frentes. Éstos escanean el espacio en el sentido de la marcha y detectan los obstáculos, incluso los que están en movimiento, como las personas que se cruzan en la trayectoria. El vehículo se detiene inmediatamente para garantizar la seguridad de los empleados.
Movilidad sin restricciones con las ruedas Mecanum
Una rueda normal se mueve sólo en la misma dirección que su eje. Para posicionar con precisión un vehículo con este tipo de ruedas, hay que maniobrar de la misma manera que cuando se aparca un coche. Para evitar esto, los desarrolladores de Evocortex optaron por la rueda Mecanum. En lugar de una superficie de rodadura cerrada, en su llanta se montan rodillos en forma de barril. Están fijados en un ángulo de 45 grados con respecto al eje de la rueda y pueden girar sobre su propio eje angular. La forma, el tamaño y la separación de los rodillos se seleccionan para dar a la rueda una superficie de rodadura continua.
Cuando la rueda Mecanum gira, surgen dos componentes de fuerza: en la dirección de rotación de toda la rueda, así como en ángulo recto con la dirección de rotación de la rueda. Por lo tanto, la dirección de movimiento resultante se encuentra en medio: la rueda de Mecanum “quiere” moverse en un ángulo de 45 grados con respecto a la dirección axial.
Sin embargo, debido a la movilidad de los rodillos, no tiene estabilidad direccional. Si hay fuerzas adicionales, su propia dirección de movimiento puede desviarse en cualquier dirección. En un vehículo con cuatro ruedas Mecanum, cada uno de los ángulos de 45 grados está dispuesto con un desplazamiento de 90 grados. Así, cada rueda intenta moverse en una dirección diferente. Variando el sentido de giro y la velocidad de cada una de las ruedas, el vehículo puede dirigirse en cualquier dirección. En el plano horizontal, puede moverse con la misma libertad que un coche volador. Las ruedas, permiten un movimiento ágil y omnidireccional del robot.
Escalabilidad en incrementos milimétricos
Los AMR de Evocortex ofrecen otra dimensión de flexibilidad: permiten una selección prácticamente ilimitada de tamaños. Toda la tecnología -sensor, controlador, unidad de elevación y accionamiento de las ruedas- está alojada debajo de la plataforma.
El módulo de accionamiento de las ruedas es un elemento decisivo para esta escalabilidad. Además, las ruedas pueden montarse a cualquier distancia entre sí. El requisito decisivo para esta disposición es un motor potente de dimensiones muy reducidas.
“Estudiamos muy de cerca qué motores del mercado eran candidatos para esta aplicación”, dice Hubert Bauer, recordando la fase de desarrollo. “Sólo con FAULHABER pudimos encontrar la densidad de potencia que necesitábamos. Los motores de la competencia no tenían espacio para el par requerido”.
¿Qué ventajas ofrecen los micromotores de Faulhaber?: Máxima potencia en un espacio muy reducido
Los módulos de rueda están equipados con micromotores de corriente continua de la serie 3257… CR o 3272…CR. Cada uno de ellos está equipado con un codificador IEF3 y un reductor 38/2S. Para una parada rápida y garantizar que las ruedas permanezcan bloqueadas en su posición una vez detenidas, los motores de las ruedas también están equipados con un freno. “Gracias a la enorme potencia de estos micromotores, el EvoRobot puede transportar provisionalmente palés con una carga de hasta 120 kilogramos“, explica Hubert Bauer. “También funciona en una rampa con una pendiente de hasta cinco grados y una velocidad de un metro por segundo”. También, la distancia al suelo es inferior a 100 mm.
Por ello, los desarrolladores han optado por un “motor de rotor plano”, un motor brushless de la serie 4221… BXT de sólo 21 milímetros de longitud.
Además de la relación entre potencia y volumen, es sobre todo el nulo mantenimiento y la fiabilidad en funcionamiento continuo lo que juega un papel importante en el funcionamiento de los AMR. “Nuestros requisitos en cuanto a la vida útil los satisfacen con creces los motores FAULHABER”, afirma Hubert Bauer. “Además, es una ventaja que los accionamientos funcionen con todos los controles industriales habituales. Los expertos de FAULHABER también fueron de gran ayuda para encontrar los ajustes óptimos de los parámetros para la producción en serie.”
Elmeq Motion y Faulhaber, la solución para dispositivos AGV
En Elmeq Motion y Faulhaber, somos especialistas en proponer soluciones mecatrónicas de precisión con la tecnología más avanzada de micromotores eléctricos. Nuestra gama, cumple todos los requisitos normativos, y nuestra amplia experiencia, nos hace ser vuestro “partner” ideal para el desarrollo de soluciones mecatrónicas. Si vas a empezar un proyecto de electromedicina, defensa, automatización industrial o la robótica, contacta con los especialistas de Elmeq.

Noticia enviada por ELMEQ