ABB Robotics y el Instituto de Investigación Neurológica Jan and Dan Duncan (Duncan NRI) del Texas Children’s Hospital, uno de los hospitales pediátricos más grandes de Estados Unidos, han logrado un avance médico innovador al crear una estación de trabajo de transferencia automatizada de Drosophila melanogaster (mosca de la fruta), que cuenta con el cobot YuMi® de ABB para ayudar en el estudio de enfermedades como el Alzheimer, el Huntington y el Parkinson.
Esta es la primera solución de automatización que no requiere que las moscas sean inmovilizadas con anestésicos como el dióxido de carbono antes de la transferencia, un paso tedioso en las soluciones de automatización anteriores, que puede afectar negativamente el comportamiento de las moscas y, potencialmente, la precisión de los resultados del estudio.
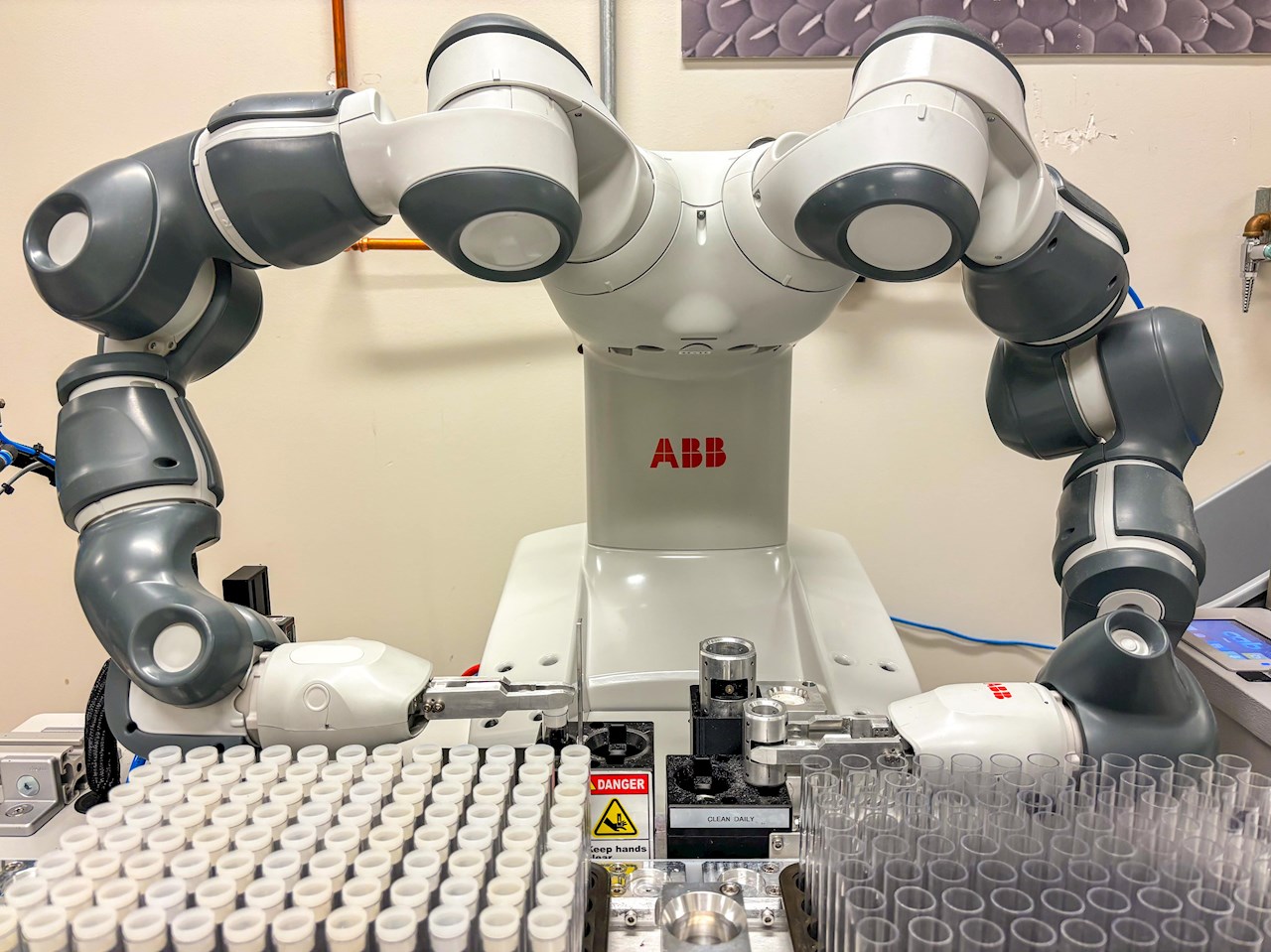
El cobot YuMi de ABB realiza los mismos movimientos que los investigadores humanos para tocar y transferir las moscas entre viales, lo que permite a los científicos centrarse en tareas cruciales para la misión, como descubrir nuevos caminos y probar la eficacia de nuevos fármacos en el tratamiento de trastornos neurológicos. Esto elimina la necesidad de anestesiar las moscas antes de la transferencia, lo que mejora la precisión de los resultados y acelera el proceso de transferencia.
«Hemos visto avances significativos en la automatización de laboratorio a lo largo de los años, pero algunas tareas cruciales todavía se realizan manualmente, lo que puede afectar los resultados», dijo José-Manuel Collados, Manager de ABB Service Robotics Product Line. «Los brazos de nuestro cobot YuMi funcionan de forma independiente pero coordinada, lo que permite automatizar la compleja tarea de transferir moscas vivas entre viales».
Drosophila melanogaster, comúnmente conocida como mosca de la fruta, es ampliamente usada en el estudio de varios aspectos de la biología, incluida la genética, el desarrollo y el comportamiento. La mosca de la fruta comparte muchos marcadores genéticos y de desarrollo con los humanos y se utiliza en estudios sobre enfermedades neurológicas humanas a nivel mundial.
Como parte del mantenimiento de rutina, los investigadores alimentan a las moscas de la fruta transfiriéndolas a viales que contienen alimentos frescos, cada 30 días. Un laboratorio típico mantiene alrededor de 20.000 viales y los investigadores pasan alrededor del 20 por ciento de una jornada laboral «volteando moscas» colocando un vial que contenga la población de moscas sobre un vial con alimento fresco y golpeándolo para que caigan las moscas. Todos los intentos de automatizar el proceso hasta la fecha implicaban exponer las moscas fuera de los viales durante la transferencia, por lo que requerían sedación.
Los ingenieros de ABB Robotics colaboraron con los investigadores del Duncan NRI para diseñar y construir una estación de trabajo de transferencia de moscas, que incluye el cobot YuMi, una mesa apilada con viales para la transferencia, una unidad de código de barras y etiquetado, y un conducto de basura.
«Esta solución innovadora para acelerar la investigación biomédica es el resultado de nuestra estrecha colaboración de más de dos años con ABB Robotics», dijo el Dr. Juan Botas, profesor del Departamento de Genética Molecular y Humana y del Departamento de Biología Molecular y Celular del Baylor College of Medicine e investigador principal del Duncan NRI. «La combinación de la biología de la mosca de la fruta y la experiencia de alto rendimiento de los investigadores del DNRI dirigidos por mí y el Dr. Ismael-Al Ramahi, profesor asistente en el Baylor College of Medicine y también investigador del Duncan NRI, con la experiencia en automatización de los ingenieros de ABB, nos permitió diseñar una solución basada en cobots, que reduce el tiempo, elimina la pérdida de tensión y permite realizar más experimentos en paralelo».
YuMi se encarga de todo el proceso de voltear moscas de la fruta, lo que incluye la realización de 10 pasos preprogramados en rápida sucesión. Al igual que los humanos, el YuMi recoge un vial que contiene moscas vivas, abre el tapón protector de acetato de celulosa, coloca el vial sobre uno con alimentos frescos, golpea los viales para transferir las moscas, tapa, etiqueta, lo escanea; y finalmente apila el vial en estanterías de cartón. A continuación, el robot desecha los viales con la comida vieja para evitar cualquier contaminación cruzada.
Una característica técnica importante integrada en la solución es la capacidad de leer códigos de barras e imprimir etiquetas, que se aplican a los viales con información de cepa y genotipo durante la transferencia. Esta característica garantiza un seguimiento y una gestión meticulosos de las cepas de Drosophila. Las tecnologías de detección avanzadas del robot permiten la colocación precisa de los viales dentro de estanterías de cartón estándar, lo que otorga a los investigadores la opción de seguir utilizando las estanterías de viales existentes, lo que reduce los costes operativos.
Más importante aún, este robot está diseñado para ser colaborativo y seguro para la interacción con los humanos. Sus brazos de detección de movimiento están equipados para detectar personas u objetos cercanos, deteniendo el movimiento instantáneamente para evitar accidentes, lo que permite un espacio de trabajo colaborativo seguro.
Noticia enviada por ABB.